
This blog is about programming your own PIC microcontroller. I had never done it before and while I was working on my own OTGW (See http://www.b00z.nl/blog/2016/04/my-first-steps-at-home-automation-and-pcb-design-otgw-led-panel-design-with-eagle-software/) I had to program it myself. Sure they offer links to people who can send you preprogrammed PIC’s, but what’s the fun of that? ;o)
First I needed some hardware. All items were ordered through AliExpress:
The PIC itself : PIC16F88-I/P
The programmer: PICKIT2 Programmer + PIC Programming Adapter
And, for this project, the OTGW firmware: download latest (gateway.hex) from http://otgw.tclcode.com/download.html#hexfiles
There are may utils that can programm PICs with eg. the pickit, however for just programming the hex I found that Linux is still the fastest way to go. At least for me.
So first you’ll install all necessary software (I’m using an Ubuntu distro):
pk2cmd
pk2cmd source: https://sourceforge.net/projects/pk2cmdv1-20-linux/
Direct Download: https://sourceforge.net/code-snapshots/svn/p/pk/pk2cmdv1-20-linux/code/pk2cmdv1-20-linux-code-3-trunk.zip
Or checkout by SVN: svn checkout svn://svn.code.sf.net/p/pk2cmdv1-20-linux/code/trunk pk2cmdv1-20-linux-code
First install libusb-dev:
sudo apt-get install libusb-dev
Next unpack the pk2cmd code into a directory or go into the pk2cmdv1-20-linux-code/pk2cmdv1.20LinuxMacSource/ directory if using the svn checkout.
Then build the software and install it:
onno@programhost:~/Software/picprogrammer/pk2cmd$ make linux make TARGET=linux make[1]: Entering directory '/home/onno/Software/picprogrammer/pk2cmd' g++ -Wall -D_GNU_SOURCE -O2 -I/usr/local/include -DLINUX -DUSE_DETACH -DCLAIM_USB -o cmd_app.o -c cmd_app.cpp (..SNIP..) pk2usbcommon.o pk2usb.o P24F_PE.o dsP33_PE.o strnatcmp.o -L/usr/local/lib -lusb make[1]: Leaving directory '/home/onno/Software/picprogrammer/pk2cmd/pk2cmdv1-20-linux-code-3-trunk/pk2cmdv1.20LinuxMacSource' onno@programhost:~/Software/picprogrammer/pk2cmd$ sudo make install mkdir -p /usr/share/pk2 cp pk2cmd /usr/local/bin chmod u+s /usr/local/bin/pk2cmd cp PK2DeviceFile.dat /usr/share/pk2/PK2DeviceFile.dat
When all finished, temporarily add the pk2 directory to your PATH var:
onno@programhost:~/Software/picprogrammer$ PATH=$PATH:/usr/share/pk2/ onno@programhost:~/Software/picprogrammer$ export PATH
Now you should be able to run the following commands:
onno@programhost:~/Software/picprogrammer$ pk2cmd -?v Executable Version: 1.20.00 Device File Version: 1.55.00 OS Firmware Version: 2.32.00 Operation Succeeded
If you haven’t connected your picit hardware, the result of the -?v command will be:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -?v Executable Version: 1.20.00 Device File Version: not found OS Firmware Version: PICkit 2 not found
To display the help:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -? PICkit 2 COMMAND LINE HELP Options Description Default ---------------------------------------------------------------------------- A<value> Set Vdd voltage Device Specific B<path> Specify the path to PK2DeviceFile.dat Searches PATH and calling dir C Blank Check Device No Blank Check D<file> OS Download None E Erase Flash Device Do Not Erase F<file> Hex File Selection None G<Type><range/path> Read functions None Type F: = read into hex file, path = full file path, range is not used Types P,E,I,C: = ouput read of Program, EEPROM, ID and/or Configuration Memory to the screen. P and E must be followed by an address range in the form of x-y where x is the start address and y is the end address both in hex, path is not used (Serial EEPROM memory is 'P') H<value> Delay before Exit Exit immediately K = Wait on keypress before exit 1 to 9 = Wait <value> seconds before exit I Display Device ID & silicon revision Do Not Display J<newlines> Display operation percent complete Rotating slash N = Each update on newline K Display Hex File Checksum Do Not Display L<rate> Set programming speed Fastest <rate> is a value of 1-16, with 1 being the fastest. M<memory region> Program Device Do Not Program memory regions: P = Program memory E = EEPROM I = ID memory C = Configuration memory If no region is entered, the entire device will be erased & programmed. If a region is entered, no erase is performed and only the given region is programmed. All programmed regions are verified. (serial EEPROM memory is 'P') N<string> Assign Unit ID string to first found None PICkit 2 unit. String is limited to 14 characters maximum. May not be used with other options. Example: -NLab1B P<part> Part Selection. Example: -PPIC16f887 (Required) P Auto-Detect in all detectable families PF List auto-detectable part families PF<id> Auto-Detect only within the given part family, using the ID listed with -PF Example: -PF2 Q Disable PE for PIC24/dsPIC33 devices Use PE R Release /MCLR after operations Assert /MCLR S<string/#> Use the PICkit 2 with the given Unit ID First found unit string. Useful when multiple PICkit 2 units are connected. Example: -SLab1B If no <string> is entered, then the Unit IDs of all connected units will be displayed. In this case, all other options are ignored. -S# will list units with their firmware versions. See help -s? for more info. T Power Target after operations Vdd off U<value> Program OSCCAL memory, where: Do Not Program <value> is a hexadecimal number representing the OSCCAL value to be programmed. This may only be used in conjunction with a programming operation. V<value> Vpp override Device Specific W Externally power target Power from Pk2 X Use VPP first Program Entry Method VDD first Y<memory region> Verify Device Do Not Verify P = Program memory E = EEPROM I = ID memory C = Configuration memory If no region is entered, the entire device will be verified. (Serial EEPROM memory is 'P') Z Preserve EEData on Program Do Not Preserve ? Help Screen Not Shown Each option must be immediately preceeded by a switch, Which can be either a dash <-> or a slash </> and options must be separated by a single space. Example: PK2CMD /PPIC16F887 /Fc:\mycode /M or PK2CMD -PPIC16F887 -Fc:\mycode -M Any option immediately followed by a question mark will invoke a more detailed description of how to use that option. Commands and their parameters are not case sensitive. Commands will be processed according to command order of precedence, not the order in which they appear on the command line. Precedence: -? (first) -B -S -D -N -P -A -F -J -L -Q -V -W -X -Z -C -U -E -M -Y -G -I -K -R -T -H (last) The program will return an exit code upon completion which will indicate either successful completion, or describe the reason for failure. To view the list of exit codes and their descriptions, type -?E on the command line. type -?V on the command line for version information. type -?L on the command line for license information. type -?P on the command line for a listing of supported devices. type -?P<string> to search for and display a list of supported devices beginning with <string>. Special thanks to the following individuals for their critical contributions to the development of this software: Jeff Post, Xiaofan Chen, and Shigenobu Kimura Operation Succeeded
Even though you’ve updated your PATH var, it still might complain it can’t find the PK2DeviceFile.dat file:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -P PK2DeviceFile.dat device file not found.
Therefore I always use the -B option:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -P Auto-Detect: No known part found.
It seems the programmer can’t recognize the PIC. This might be because it’s not one of the ‘default’ type (see listing further down), or maybe you haven’t connected it the right way to the device. One indication of the PIC not being correctly connected to the programmer is with the following output:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -P Auto-Detect: No known part found. VDD Error detected. Check target for proper connectivity.
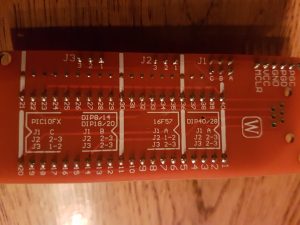
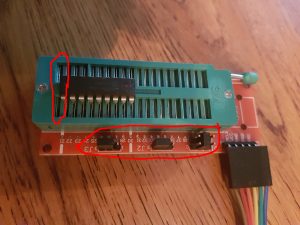
I bought my programmer including an adapter. Which had several options for different PICs. I ended up using a multimeter with the Continuity setting (howto: https://learn.sparkfun.com/tutorials/how-to-use-a-multimeter/continuity) to verify the right pins are connected to the right input pins. As you see below my adapter has three jumpers with different settings for different PIC’s. In my case it turned out (using the multimeter) that I had to move my PIC one place up for the pins to line up correctly.
Another way, like when you don’t have an adapter, is to directly connect the pins of the PIC to the right pins of the programmer using jumper wires.
To get a list of supported PIC’s, run:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -PF Auto-Detectable Part Families: ID# Family 0 Midrange/Standard 1 Midrange/1.8V Min 2 PIC18F 3 PIC18F_J_ 4 PIC18F_K_ 5 PIC24 6 dsPIC33 7 dsPIC30 8 dsPIC30 SMPS 9 PIC32 Operation Succeeded
When all is setup correctly, and you’re using a PIC16F88P, it should auto detect the PIC, the indicator LED’s on the programmer will flash:

onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -P Auto-Detect: Found part PIC16F88. Operation Succeeded
To get the best results, first you erase your PIC memory:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -PPIC16F88 -X -E Erasing Device... Operation Succeeded
And then program it, in this case with the gateway.hex:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -PPIC16F88 -M -Fgateway.hex PICkit 2 Program Report 29-10-2016, 18:03:09 Device Type: PIC16F88 Program Succeeded. Operation Succeeded
After programming, always double check it loaded correctly:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -PPIC16F88 -Y -Fgateway.hex PICkit 2 Verify Report 29-10-2016, 18:03:40 Device Type: PIC16F88 Verify Succeeded. Operation Succeeded
If the programmed code doesn’t match the hex file, you’ll get:
onno@programhost:~/Software/picprogrammer$ sudo pk2cmd -B/usr/share/pk2/ -PPIC16F88 -Y -Fgateway.hex PICkit 2 Verify Report 29-10-2016, 17:59:39 Device Type: PIC16F88 Program Memory Errors Address Good Bad 000000 00158A 003FFF
Well, that are the basics from my point of view. I hope you found this post useful.
– Onno.